
Los Robots destacados: robotica industrial
El inteligente Robot: Video
Robots:

Robots
Los Robots Diferentes

Los conocimientos interdisciplinares de la Ciencia Cognitiva Corporizada y la Nueva Inteligencia Artificial permiten concebir sistemas avanzados con capacidad de autogobernarse. El máximo nivel de estos sistemas lo representa la así llamada Arquitectura de Tres Capas, que incluye tres procesos diferentes afines a la teoría de Freud sobre la integración del Ello, el Super-yo y el Yo. Los niveles reactivo, deliberativo y reflexivo serán las características futuras de los robots inteligentes.
Robots Fuera de Serie: Bailan Gangnam Style
La coreografía es notable y el video mucho mejor, los pasos que pueden hacer estos robots nos demuestran que, aunque algunos no tengan mucho ritmo, los humanos podemos hacerlo mucho mejor.
Otros Robots Fuera de Serie
Tipos de Robots para el Hogar
Las innovaciones en la robótica están haciendo posible la creacion de varias clases de robots domésticos. Se trata de robots que facilitan las tareas más domesticas y otros solo para el entretenimiento, tareas de seguridad, atención de personas mayores, y otros que nos depara el futuro más cercano.
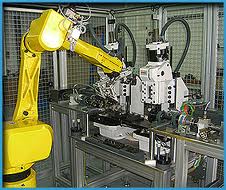
Tipos de robots en la Industria y su concepto
Los robots industriales componen una gran gama de tamaños y configuraciones. Laconfiguración hace referencia a la forma física que le ha sido dada a los brazos.Podemos encontrar las siguientes configuraciones.
Robot cartesiano
. Este tipo de robot utiliza tres dispositivos deslizantesperpendiculares entre si, para generar movimientos de acuerdo a los tres ejescartesianos X, Y y Z.
Robot cilíndrico
. Se basa en una columna vertical que gira sobre la base. Tambiéntiene dos dispositivos deslizantes que pueden generar movimientos sobre los ejes Z eY.
Robot esférico o polar
. Utiliza un brazo telescópico que puede bascular en torno a uneje horizontal. Este eje telescópico está montado sobre una base giratoria. Lasarticulaciones proporcionan al robot la capacidad de desplazar el brazo en una zonaesférica.
Robot de brazo articulado
. Se trata de una columna que gira sobre la base. El brazocontiene una articulación, pero sólo puede realizar movimientos en un plano. En elextremo del brazo contiene una eje deslizante que se desplaza en el eje Z. El robotmás común de este tipo se conoce como robot SCARA.
Robot antropomórfico
. Está constituido por dos componentes rectos que simulan elbrazo o antebrazo humano, sobre una columna giratoria. Estos antebrazos estánconectados mediante articulaciones que se asemejan al hombro y al codo.
Poliarticulados.
Son robots sedentarios, o sea que no se pueden desplazar, estándiseñados para mover sus brazos y herramientas en un determinado espacio detrabajo. En este grupo se encuentran los manipuladores y algunos robots industriales.
Móviles.
Son robots con gran capacidad de desplazamiento, acoplados a carros oplataformas. Estos robots aseguran el transporte de un sitio a otro de piezas. Estándotados de un cierto grado de inteligencia, lo que les permite sortear obstáculos.
Nanorobots.
Son pequeños robots capaces de cosas sorprendentes. Existen algunosque viajan por la sangre y son capaces de inyectar la cantidad precisa de droga enuna célula. Se trata de robots experimentales.
Androides.
Son robots que intentan reproducir la forma y los movimientos del ser humano. En la actualidad son poco evolucionados y con poca utilidad práctica.
Zoomórficos.
Se caracterizan por imitar el sistema de locomoción de algunos seresvivos. Se encuentran el pleno desarrollo se utilizan para desplazarse sobre superficiesaccidentadas y con numerosos obstáculos. Su aplicación práctica tiene bastanteinterés en la exploración de otros planetas así como el estudio de volcanes, y entornosde difícil acceso.
